4‐5 加速轉矩(Ta)求法
步進馬達之運轉特性,必須絕對跟隨脈波命令,做相對應位置之移動,否則會有位置不正確之情形,即一般所謂之『失步』現象;
當脈波命令之初始值(起動頻率)不為「0」之情形下,馬達即必須由「靜止」狀態, 瞬間反應到脈波命令之相對應速度,之後再隨脈波命令加快而加速;
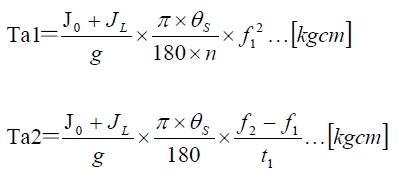
由上述說明可知,步進馬達之加速轉矩(Ta)包含兩種加速狀態,
【1】「自起動」加速轉矩(Ta1)、【2】「加減速」加速轉矩(Ta2),如下所式:
加速轉矩(Ta)=「自起動」加速轉矩(Ta1)+「加減速」加速轉矩(Ta2)