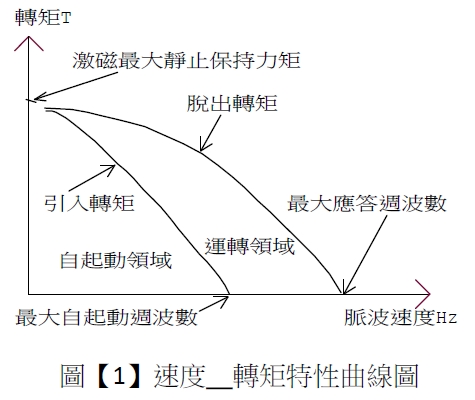
(1) 激磁最大靜止保持力矩:馬達靜止時,對馬達輸入「額定電流」所產生之保持力矩。
(2) 最大自起動週波數:在無負載且不失步的情況下,馬達可「即走即停」之最高頻率。
(3) 最大應答週波數:在無負載且不失步的情況下,馬達可正常運轉之最高頻率。
(4) 自起動領域:在不同負載且不失步的情況下,馬達可「即走即停」之「區域範圍」。
(5) 運轉領域:在不同負載且不失步的情況下,馬達可正常運轉之「區域範圍」。
(6) 引入轉矩:「即走即停」不失步的情況下,在一定脈波速度時馬達所產生之轉矩。
(7) 脫出轉矩:不失步的情況下,在一定脈波速度運轉,馬達產生之「最大轉矩」。
(8) 步級角θs:步進馬達輸入一個脈波, 轉子所轉動的角度大小。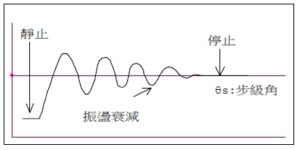
(9) 單步級響應:步進馬達在靜止狀態下,輸入一個脈波,使轉子轉動一個步級角的暫態響應特性。
(10) 解析度(分解能):馬達一迴轉的分割數。
(11) PPS【Pulse Per Second】:每秒所產生(或接收)之脈波數。
(12) 共振:在某一特定速度下,馬達運轉振動變大,造成轉矩滑落之現象。
(13) 共振領域:產生共振現象之速度範圍區間。
(14) 單脈波信號:由一信號控制馬達走∕停,另一信號控制馬達正∕逆轉【PLS∕DIR】之脈波信號方式。
(15) 雙脈波信號:由一信號控制馬達正轉,另一信號控制馬達逆轉【CW∕CCW】之脈波信號方式。
(16) 角度誤差:步進馬達理論上的動作角度和實際轉動所產生的動作角度之誤差。
(17) 慣性慣量(J):物體維持原有速度狀態(慣性)之數值。
(18) 飛輪效應(GD2):4 倍慣性慣量,GD2=4J。
(19) 定電壓驅動:對馬達線圈輸入「固定」大小之電壓,使馬達流過相對應電流之方式。【若輸入電壓大於馬達之「額定值」,須外加功率電阻降壓 ….. 體積大、效率低】
(20) 定電流驅動:對馬達線圈輸入大於馬達「電壓額定值」「數倍」之電壓,再以 PWM方式(Pulse Width Modulation 脈寬調變),控制馬達流過「固定」電流大小之方式。【控制迴路較為複雜,但體積小、效率高、響應快 ….. 市面上絕大多數產品採用】
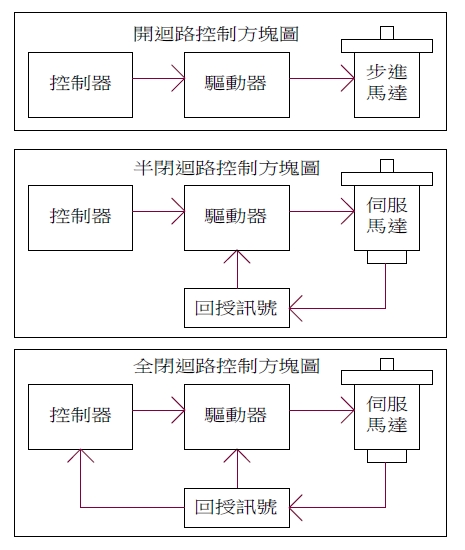
(21) 開迴路控制、半閉迴路控制、全閉迴路控制: